Gripper dibedakan menjadi beberapa jenis, antara lain elektrik dan pneumatik.Lantas, apa perbedaan antara gripper elektrik dan gripper pneumatik?
1: Apa yang dimaksud dengan gripper industri?
Gripper industri juga dikenal sebagai mekanisme gripper mekanis.Mekanisme gripper robot dirancang sesuai dengan kebutuhan kerja sebenarnya dan memiliki berbagai macam bentuk.
Gripper mekanis umumnya merupakan gripper dua jari, yang dicirikan oleh sifat gerak, cengkeraman, dan mekanisme.Selanjutnya, mari kita bahas beberapa aspek penting.Salah satunya adalah mekanisme penjepit ujung pneumatik, yang ditandai dengan kecepatan kerja yang sangat cepat, fluiditas yang berasal dari sistem hidrolik, kehilangan tekanan yang relatif kecil, dan cocok untuk pengendalian jarak jauh.Yang kedua adalah mekanisme penjepit ujung isap, yang menggunakan gaya isap mangkuk pengisap untuk menggerakkan benda.Hal ini terutama cocok untuk objek dengan peningkatan moderat dalam rasio penampilan dan ketebalan, seperti kaca, hanya kertas, dll. Salah satunya adalah mekanisme penjepit ujung hidrolik yang menjepit objek dengan penjepit hidrolik dan pelepasan pegas.Namun, pada akhirnya, kemampuan robot industri dapat membantu kita melakukan pekerjaan dengan lebih baik.
2. Perbedaan antara gripper listrik dan gripper pneumatik
Dibandingkan dengan gripper pneumatik, penerapan gripper elektrik di bidang otomasi industri memiliki ciri-ciri sebagai berikut:
1), jenis motor listrik memiliki mekanisme self-locking, yang dapat mencegah kerusakan peralatan benda kerja akibat matinya listrik.Dibandingkan dengan gripper pneumatik, ini lebih aman;
2), gripper listrik memiliki fungsi kontrol yang dapat diprogram untuk mencapai pemosisian multi-titik.Gripper pneumatik hanya memiliki dua stop, sedangkan gripper elektrik dapat memiliki lebih dari 256 stop.Akselerasi dan deselerasi jari listrik dapat dikontrol untuk meminimalkan dampak pada benda kerja.
3), gripper elektrik adalah gripper fleksibel yang dapat mencapai kontrol gaya yang presisi, sedangkan gripper pneumatik adalah proses berosilasi.Pada prinsipnya ada osilasi yang sulit dihilangkan.Kekuatan penjepitan gripper listrik dapat disesuaikan untuk mewujudkan kontrol gaya loop tertutup.Akurasi gaya penjepit bisa mencapai 0,01N, dan akurasi pengukuran bisa mencapai 0,005 mm.Kekuatan dan kecepatan gripper pneumatik pada dasarnya tidak dapat dikontrol, sehingga tidak dapat digunakan untuk pekerjaan halus dengan fleksibilitas tinggi.
4), volume gripper listrik jauh lebih kecil dibandingkan dengan gripper pneumatik.Pemasangannya juga sangat mudah.Perawatannya sederhana.
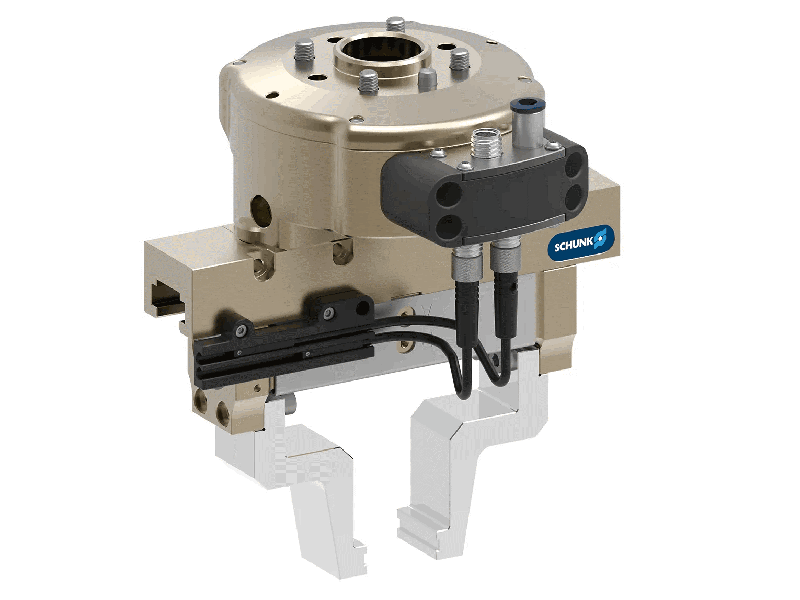
gripper pneumatik
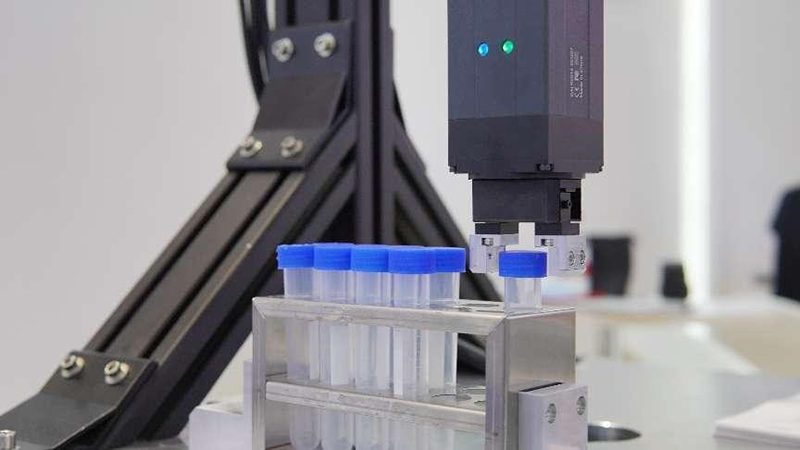 Pencengkeram Listrik
Pencengkeram Listrik
3. Keuntungan gripper listrik
1. Kontrol posisi rahang
Posisi rahang dapat ditentukan dengan menggunakan motor berkode dan skema kontrol yang sesuai.Berbeda dengan rahang tradisional, biasanya diperlukan pukulan penuh.Saat menggunakan gripper listrik, gunakan hanya jarak yang diperlukan di dekat bagian tersebut dan kemudian minimalkan pergerakan.Sakelar suku cadang memfasilitasi pemilihan ukuran suku cadang yang lebih luas tanpa mengorbankan waktu siklus produksi.
2. Kontrol cengkeraman dan kecepatan
Karena arus motor berbanding lurus dengan torsi yang diterapkan, gaya cengkeraman yang diterapkan dapat dikontrol.Hal yang sama berlaku untuk kecepatan penutupan.Misalnya, ini mungkin membantu bagian yang rapuh.
Waktu posting: 19 Des-2022